Sep 8. 2022 - Latest News
Today, the evaluation results of the 2022 National Natural Science Foundation of China (NSFC) applications were announced. WAN Fang, Assistant Professor of SUSTech School of Design (hereinafter referred to as "the School") , has been approved to apply for the category of Youth Project, which is entitled "Research on the Mechanism of Learning Mechanisms of Visual-Tactile Integration of Fast and Slow Speed Fine Force Haptics". This project is the first one approved by the NSFC in the School.

The current research on visual-tactile fusion force haptic perception mainly focuses on data-driven algorithm design and optimization, and the basic research challenges in the three aspects of fine sensing mechanism of human-like skin mechanoreceptors, structured data characterization principle of force haptic signals, and adaptive machine learning for force haptic interaction are still not effectively solved, which seriously restricts the application of force haptic interaction in the new generation of artificial intelligence frontier.
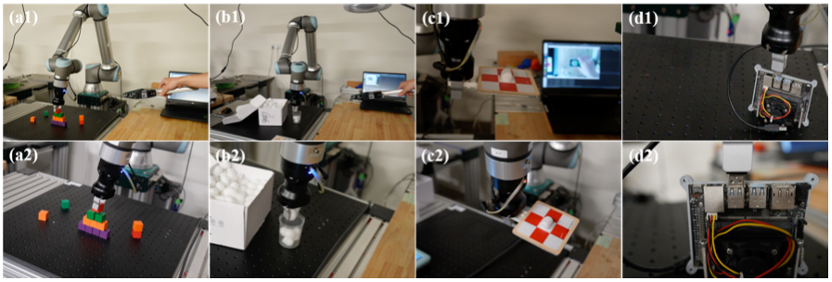
Prof. WAN's research focuses on the "14th Five-Year Plan" development strategy of "robot bionic perception" frontier technology, proposes to mimic the continuous force-tactile perception mechanism of human skin fast and slow mechanoreceptors, establishes the dynamics and viscoelasticity theory of the finger structure of the flexible metamaterial 3D network, and adopts the high frame rate and high speed mechanoreceptors for the force-tactile interaction. We propose a continuous force-touch perception mechanism that mimics human skin's fast- and slow-speed mechanoreceptors, establish the dynamic viscoelasticity theory of flexible metamaterials and three-dimensional network finger structures, adopt a high-frame-rate microcamera to capture the omni-directional self-adaptive physical deformation of the flexible structures in real time, construct a multimodal characterization mechanism of high-dimensional force-touch helical point cloud by combining helical theory and three-dimensional point cloud, reveal the hidden spatial characteristics of the graph neural network of the opto-contact fusion-type fine force-touch sensation, and realize real-time six-dimensional position estimation based on the high-dimensional helical point cloud, so as to solve the problem of opto-touch fusion of fast- and slow-speed fine Perceptual learning problem for the force-controlled intelligent assembly task of flexible robotic hands, providing the enabling basic theory and cutting-edge application technology for the new generation of artificial intelligence of opto-tactile fusion-type fine force-haptic perception.




Nov 27. 2025 - Latest News
.png)
Sep 9. 2024 - Latest News
Nov 29. 2023 - Latest News